自律走行ロボット(AMR)とは、センサーと AI で環境を認識し、自由に走行してピッキングや搬送を行うロボットのことです。ルートを自動算出し障害物を回避できるため、人と協働しやすいのが特徴です。
ユニテックではこれまで培ったモータ技術を活かし、ソフトウェア受託開発を得意とするパートナー企業と共に、多種ご用途で使用可能なお客様オリジナルAMRの受託開発・製造支援いたします。
ユニテックのAMR(自律走行ロボット)受託開発・製造サービスの特徴
弊社の AMR 開発支援・製造サービスは、悪路や過酷環境での自律走行を前提に設計された移動ロボットをワンストップで提供します。
荒地・凹凸路面・段差・急勾配・砂地・湿地といった多様な路面条件に対応できるほか、用途や環境に合わせて車輪型、クローラ(キャタピラー)型、脚式などの駆動機構を柔軟にカスタマイズが可能です。
長年にわたるモータ開発・製造で培ったノウハウを生かしながら、パートナー企業のロボット制御技術による緻密な動作制御と、環境・仕様ごとに最適化した移動プロトコルの開発により、「走れる場所」を拡張し、お客さまの現場課題を解決します。
製品開発事例
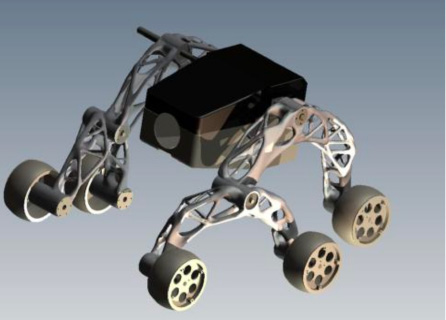
災害地用クローラロボット
「行けない場所」へ、最速で安全に。リアルタイムで高精度の情報を収集・運搬
弊社の受託開発サービスで手掛けた代表的なプロジェクトの一つが、災害現場向けクローラ型移動ロボットです。
災害現場向けクローラ型移動ロボットは、人が近づけない瓦礫・浸水・急斜面などの過酷環境で「状況把握や資機材搬送が困難」という課題を解決するため、全地形走破性・高度遠隔操作・柔軟なペイロード換装を求められて受託開発された自律走行ロボットです。
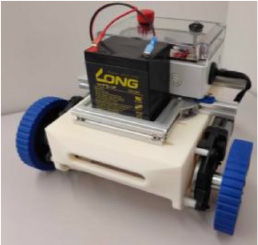
農業用ロボット
農園でのコンテナ搬送作業を自動化、収穫ピーク時の人手不足を緩和

農業用搬送ロボットは、傾斜やぬかるみが多い園地で収穫した果物のコンテナを樹列間から集荷ポイントまで効率よく運搬します。
果実を傷めず・人手を削減しながら搬送作業を行える自律走行ロボットです。
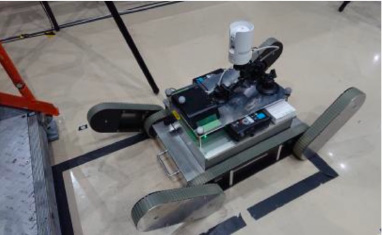
AGV⽤台⾞
「行けない場所」へ、最速で安全に。リアルタイムで高精度の情報を収集・運搬

AGV⽤台⾞は、⼯場・倉庫の⽣産ラインや配送ゾーンで 「多様な荷姿のパレット/治具を⼀括搬送したいが、台⾞交換や搬送経路の制約により AGV への載せ替え効率が低い」 という課題を解決しました。
「⾼耐荷重・⾼精度ドッキングと安全機能を備えた専⽤台⾞で AGV の稼働率と現場安全を両⽴させたい」 というご要望に応えて受託開発した事例です。
よくあるご質問
受託開発を依頼してから量産立ち上げまで、通常どのくらいの期間と工程が必要ですか?
お客様のご要望と社内状況を考慮し、スケジュールを調整いたします。
要求仕様がまだ固まっていない段階でも相談できますか?
はい、可能です。
プロトタイプの実証実験や性能評価はどこまで対応してもらえますか?
内容によって異なります。ご要望があれば、ご相談ください。
現場導入後の保守・アップデート、部品供給体制はどうなっていますか?
内容によって異なります。ご要望があれば、ご相談ください。
概算費用を算出してもらうには、どのような情報や資料を提供すればよいですか?
要求仕様などが固まっていない段階でも算出は可能ですが、利用するシチュエーション、環境、条件などお伺い出来る範囲で詳しく情報を頂けると、より詳細な費用を算出できます。